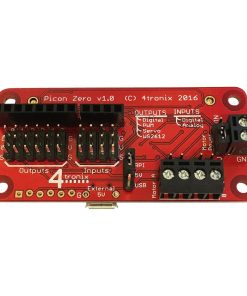





Picon Zero is an Intelligent robotics controller for your Raspberry Pi based mobile robot. A built-in processor handles all the direct communication with your input and output devices, leaving you to worry about the overall control with your Raspberry Pi program.
As well as 2 full H-Bridge motor drivers, the Picon Zero has a number of Input and Output pins that can be configured in a variety of ways, allowing you to easily add analog inputs or neopixel outputs to your Raspberry Pi without any complicated software and kernel specific drivers. It also provides an interface for an HC-SR04 ultrasonic distance sensor (not included) and opens up 5 GPIO pins from the Raspberry Pi for you to use as you see fit.
Features:
- Compatible with all 40-pin Raspberry Pi variants (3/2/B+/A+ or Zero)
- I2C interface, leaving all GPIO pins free for your own use*
- 2 full H-Bridge motor drivers with full forward/reverse and speed control. Up to 1.5A continuous per channel (2A peak)
- 6 general purpose output channels (5V) that can be set as: Digital, PWM, Servo, WS2812( aka neopixels)
- 4 general purpose inputs (5V) that can be Digital, Analog, DS18B20 (digital temperature sensor)
- All inputs and outputs use 3-pin GVS connectors (Ground, Volts, Signal) – allowing 3-pin sensors, servos, etc. to plug straight in
- Dedicated socket for HC-SR04 ultrasonic sensor. Plug it straight in, or use jumper wires to mount it further away
- 5 GPIO signals, 5V, 3V and Ground brought out to a header
- Power for outputs can be from Raspberry Pi’s 5V or from an external USB input line
- Power for motors can be from internal/external 5V, or from a separate power source (3V to 11V)
- Both motor terminals have 2-pin screw connectors AND 2-pin male headers to allow maximum flexibility in connecting
- Python library module making it super-easy to use any of the features
This controller board is supplied fully assembled. No soldering is required.
More information, software and examples can be found here
* 5 of the GPIO pins are available on a female header. To access the others you will need to attach directly to the GPIO pins
Fast Shipping and Professional Packaging
Because of our long-standing partnership with UPS, FedEx, DHL and many other leading global carriers, we can provide various shipping options. Our warehouse staff is highly trained and will pack the items according to our exact and precise specifications. Before shipping, your goods will be thoroughly examined and secured. We deliver to thousands of customers every day from all over the world. This is a sign of our dedication to being the largest online retailer worldwide. There are distribution centers as well as warehouses located in Europe as well as the USA.
Note: Orders with more than one product are assigned a specific processing period dependent on the particular item.
Before shipping, we will examine the items ordered carefully before shipping. The majority of orders are shipped within 48 hours. The time to deliver varies from 3-7 days.
Returns
The stock is constantly changing and cannot be fully controlled by us due to the involvement of many parties including the factory and our warehouse. This means that the actual stock could alter at any time. Be aware that it is possible that your order could be out of stock after you have made the order.
Our policy lasts thirty days. If you haven't received your item within 30 days, we're unable to offer the option of a refund or exchange.
You are able to return an item when it's unopened and is in the same condition as when you first received it. It should also be returned in its original packaging.
Related products